Videos
(a)
Velocity and acceleration of robot tip A.
Answer to Problem 11.161P
We got,
Final velocity,
Final acceleration,
Explanation of Solution
Given information:
Time
Concept used:
Velocity
Acceleration
Calculation:
Velocity,
And,
Final velocity,
Radial acceleration,
Transverse acceleration,
Final acceleration,
Conclusion:
We got,
Final velocity,
Final acceleration,
(b)
To plot: the path of tip.
Explanation of Solution
Given information:
Time
Concept used:
MS Excel shall be used to plot the path.
Calculation:
We know
Following table is being made,

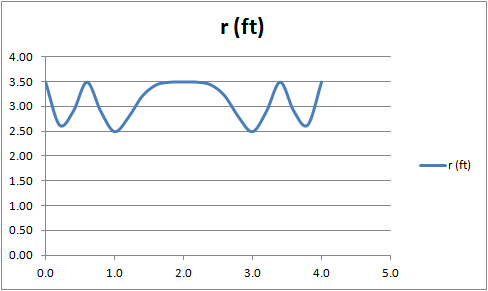
Conclusion:
Plot has been shown above.
Want to see more full solutions like this?
Chapter 11 Solutions
Vector Mechanics For Engineers


- a = 1 m b = 2 m c = 3 m Force AB = 500 Newtons FAB Find the y-component of unit vector AC. (Hint: the value should be less than 1). Find the z-component of unit vector AC. (Hint: the value should be less than 1). Find the x-component of Force AB in N. If the calculated answer is not whole number, express it in 4 significant figures. If the value is negative, include a negative sign.arrow_forward4.2 As shown in the figure below. Try to get the numerical solutions (0₁, 02, 03) of one of above two specified positions(P₁ or P₂). Yo لیا 3 2 O P2 3 a2-60° P₁ E-α=0° 5 Xoarrow_forward30 N * "The moment about point A is 35 N 1.5 m B 40% 2m 45° 20 N 80 N.m A 58.25 N.M counter clock-wise O 78.25 N.M counter clock-wise O 58.25 N.M clock-wise O 3m 2m²arrow_forward
- Q1-e) Kinetics: is used to predict the motion caused by given forces or to determine the forces required to produce given motion True O False Oarrow_forwardIn (Figure 1), F = {60i+72j+36k} lb. Figure 1 ft ΜΑ = A -2 ft- Part B 3 ft Determine the magnitude of the moment of F about point A. Express your answer in pound-feet to three significant figures. Submit Request Answer a, ß, y = 45° 1 of 1 Previous Figure VE ΑΣΦ ↓↑ vec B F ΓΠ ΑΣΦ ↓↑ vec ? Determine the coordinate direction angles of the moment of F about point A. Express your answers in degrees to three significant figures separated by commas. lb. ft ?arrow_forwardThe branch of mechanics that deals with the bodies in motion is called O Dynamics Science O Applied Science O Statics A pair of equal and unlike parallel forces produces a rotational motion in a body. Select one: O True Falsearrow_forward
- Determine the magnitude of the vector difference V' = V2 -2V, and the angle 0, which V' makes counterclockwise from the positive x-axis. The angle 0, will be a positive number between 0 and 360°. Complete both graphical and algebraic solutions. You will have to draw an accurate figure for the graphical solution. y V = 28 unit$ V = 31 units 4 2 29° Answers: %3D V' = i unitsarrow_forwardF1 F2 a C F3 A d F4 D Consider the following values: - F5 a = 25 m; b = 5 m; c = 25 m; d = 5 m; F1 = 4 kN; F2 = 2 kN; F3 = 5 kN; F4 = 7 kN; F5 = 3 kN; a = 30° , 0 = 60° , B = 30° 1] What is the resultant moment of the five forces acting on the rod about point A?arrow_forward1- A line 10mm in length inclined at 75 degrees to the x- axis can be represented as, A. will write 0<75 B. will write 0<15 C. will write 10 <15 D. will write 10 <75 2- How will you create a line representing length 15 units at an angle of 30 degrees with respect to the positive direction of the X-axis and the first point of the line is not at the origin? А. 30<15 B. 15<30 С. @30<15 D. @15<30 3- A fillet command is used to produce, A. Sharp corners B. Round corners C. Both of the above D. None of the above 4- Which statement is true about the precedence of lines? A. a hidden line has precedence over a visible line B. a center line has precedence over a visible line C. a visible line has precedence over a center line D. all of the abovearrow_forward
- Q4/ Determine the magnitude of the vector V and the angle e which vector V makes with positive x-axis? V 14 units V1 18 units %3D 60arrow_forwardQ1: Determine the Moment of the Force 800N shown in Fig, about point O By at least 3 ways. 875 mm 625 mm 30 F = 800 N Q2: The effect or two forces FA,FB is (5 KN) and acting along u axis, determine the value of FB by parallelogram method (nun perpendicular coordinate) 00 FA-3 kN 00 00 00 #六女女六六☆☆☆会☆☆女☆☆女☆六☆☆☆☆☆女☆☆☆六☆☆☆☆女☆☆六六☆哈如セ4 位信名 8883 ******** ****** *******arrow_forwardQuestion 1: The figure below shows a robotic arm OA. Determine the distance from point O to the actuator at B given the angle a of arm AB is 16°. В 300 mm a A 400 mm 60°,arrow_forward
 Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press
Elements Of ElectromagneticsMechanical EngineeringISBN:9780190698614Author:Sadiku, Matthew N. O.Publisher:Oxford University Press Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON
Mechanics of Materials (10th Edition)Mechanical EngineeringISBN:9780134319650Author:Russell C. HibbelerPublisher:PEARSON Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education
Thermodynamics: An Engineering ApproachMechanical EngineeringISBN:9781259822674Author:Yunus A. Cengel Dr., Michael A. BolesPublisher:McGraw-Hill Education Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY
Control Systems EngineeringMechanical EngineeringISBN:9781118170519Author:Norman S. NisePublisher:WILEY Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning
Mechanics of Materials (MindTap Course List)Mechanical EngineeringISBN:9781337093347Author:Barry J. Goodno, James M. GerePublisher:Cengage Learning Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY
Engineering Mechanics: StaticsMechanical EngineeringISBN:9781118807330Author:James L. Meriam, L. G. Kraige, J. N. BoltonPublisher:WILEY